
Open Loop Control System - (Formula Notes)
Learn about the Open Loop Control System (Formula Note), explained with diagrams on this webpage. Prepare effectively for GATE 2024 with these short notes.
Share
Open Loop Control System: An open-loop system is a type of system that does not have any type of feedback. So that it is also indicated as a non-feedback system.
 In the above block diagram, process output (output of the open loop system) is denoted as C(s), and the desired process response (input to the open loop system) is denoted as R(s). The combination of controller and process is known as the open-loop transfer function, which is denoted by G(s)H(s). So that block diagram can be represented as given below.
In the above block diagram, process output (output of the open loop system) is denoted as C(s), and the desired process response (input to the open loop system) is denoted as R(s). The combination of controller and process is known as the open-loop transfer function, which is denoted by G(s)H(s). So that block diagram can be represented as given below.
 If there is no feedback from the output C(s) to the input R(s), then the system is said to be an Open Loop Control System.
The output of the open-loop control system is affected not only by input variations but also by disturbances. The open-loop control system doesn’t automatically correct the disturbance.
The accuracy of this type of system depends on the accuracy of the input calibration. Some common examples of open-loop control systems are:
If there is no feedback from the output C(s) to the input R(s), then the system is said to be an Open Loop Control System.
The output of the open-loop control system is affected not only by input variations but also by disturbances. The open-loop control system doesn’t automatically correct the disturbance.
The accuracy of this type of system depends on the accuracy of the input calibration. Some common examples of open-loop control systems are:
- Traffic light controller operated based on timer
- Electric washing machine
- Automatic coffee server
- Bread toaster
- Air cooler
- Water heater
- Electric Bulb
- Electric Hand Drier
Advantages of Open Loop Control System
- Simple, easy to design and economical due to the smaller number of components.
- Generally, open-loop systems are stable.
Disadvantages of Open Loop Control System
- Inaccurate
- Unreliable
- The effect of parameter variation and external noise is greater.
Note: Open-loop control systems do not require performance analysis.
Some Basic Transfer functions of open-loop control system
First-order system (O. L. C. S.)
Here we have a brief discussion of the first-order open-loop transfer function for an impulse input and delayed impulse input.
 In a first-order system, we have only 1 pole, which may be at the origin or on any side of the s-plane.
In a first-order system, we have only 1 pole, which may be at the origin or on any side of the s-plane.

Second-order system (O. L. C. S.)
Here we have a brief discussion of the second-order open-loop transfer function.
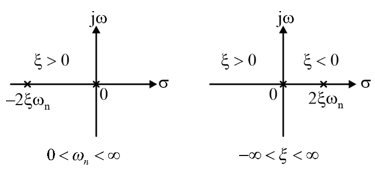
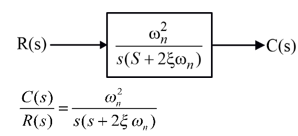 In the standard second-order system, we have one pole at the origin and another at a different location in the s-plane.
Here we have the pole location for a second-order open-loop transfer function for different values of the damping ratio.
In the standard second-order system, we have one pole at the origin and another at a different location in the s-plane.
Here we have the pole location for a second-order open-loop transfer function for different values of the damping ratio.
🔥 Trending Blogs
Talk to a counsellorHave doubts? Our support team will be happy to assist you!

Check out these Related Articles



Join 15 Million students on the app today!

Free Learning Resources
PW Books
Notes (Class 10-12)
PW Study Materials
Notes (Class 6-9)
Ncert Solutions
Govt Exams
Our Other Websites
Class 6th to 12th Online Courses
Govt Job Exams Courses
UPSC Coaching
Defence Exam Coaching
Gate Exam Coaching
Other Exams
Know about Physics Wallah
Physics Wallah is an Indian edtech platform that provides accessible & comprehensive learning experiences to students from Class 6th to postgraduate level. We also provide extensive NCERT solutions, sample paper, NEET, JEE Mains, BITSAT previous year papers & more such resources to students. Physics Wallah also caters to over 3.5 million registered students and over 78 lakh+ Youtube subscribers with 4.8 rating on its app.
We Stand Out because
We provide students with intensive courses with India’s qualified & experienced faculties & mentors. PW strives to make the learning experience comprehensive and accessible for students of all sections of society. We believe in empowering every single student who couldn't dream of a good career in engineering and medical field earlier.
Our Key Focus Areas
Physics Wallah's main focus is to make the learning experience as economical as possible for all students. With our affordable courses like Lakshya, Udaan and Arjuna and many others, we have been able to provide a platform for lakhs of aspirants. From providing Chemistry, Maths, Physics formula to giving e-books of eminent authors like RD Sharma, RS Aggarwal and Lakhmir Singh, PW focuses on every single student's need for preparation.
What Makes Us Different
Physics Wallah strives to develop a comprehensive pedagogical structure for students, where they get a state-of-the-art learning experience with study material and resources. Apart from catering students preparing for JEE Mains and NEET, PW also provides study material for each state board like Uttar Pradesh, Bihar, and others
Copyright © 2026 Physicswallah Limited All rights reserved.