Kepler's Laws, Important Topics For JEE Main 2024 Physics ,Law Of Orbit
Kepler's Laws
Kepler's Laws : We know Kepler did not know why the planets move in this way. Three generations later when Newton turned his attention to the motion of the planets, he discovered that each of Kepler’s laws can be derived. They are consequences of Newton’s law of motion and the law of gravitation. Laws of areas, laws of orbits and law of orbits are discussed in detail.
At last, we have summarized all points in a way discussing the trajectory of all particles thrown at certain velocities which may be elliptical, hyperbolic, parabolic or circular.
Kepler's Laws of Planetary Motion
Kepler's Laws of Planetary Motion : Kepler discovered three empirical laws that accurately described the motion of the planets. The three
laws may be stated as,
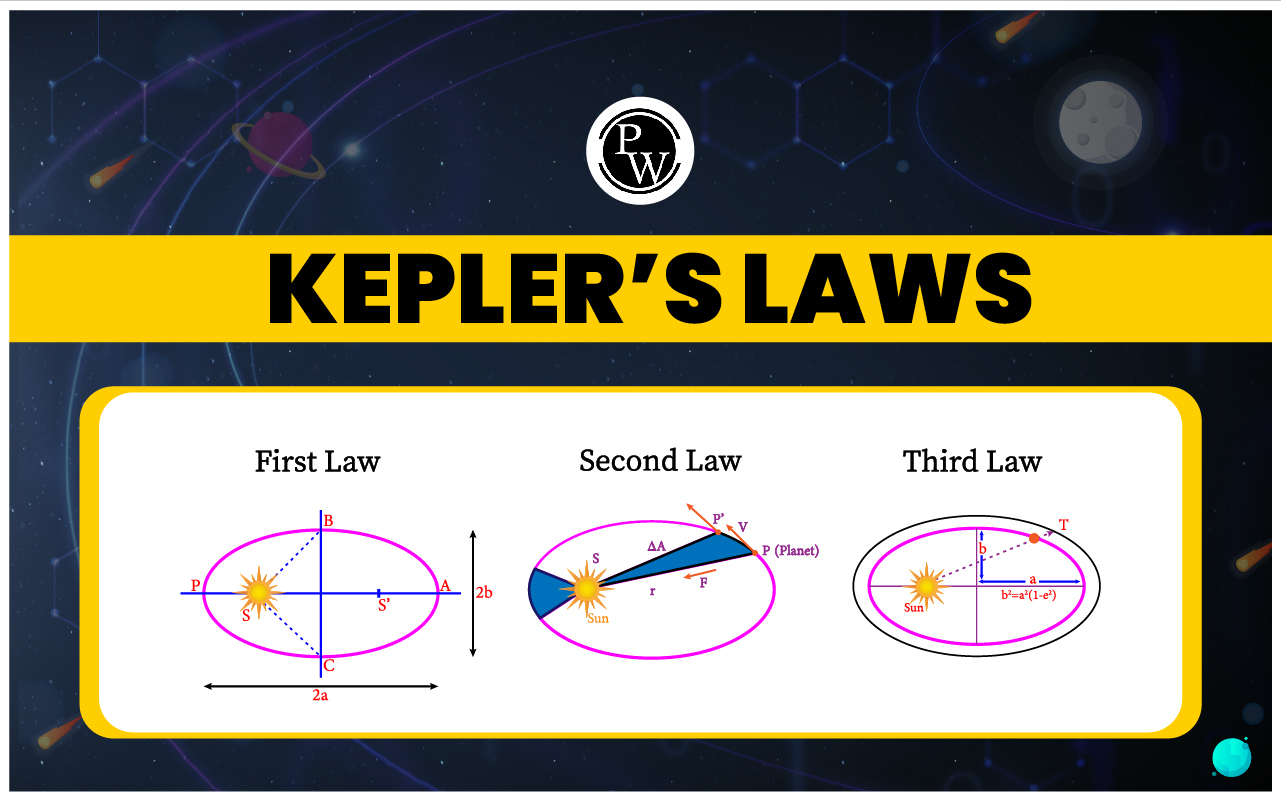
(i) Each planet moves in an elliptical orbit, with the sun at one focus of the ellipse. This law is also known as the law of elliptical orbits and obviously gives the shape of the orbits of the planets round the sun.
(ii) The radius vector, drawn from the sun to a planet, sweeps out equal areas in equal time, i.e. its areal velocity (or the area swept out by it per unit time) is constant. This is referred to as the law of areas and gives the relationship between the orbital speed of the planet and its distance from the sun. (iii) The square of the planet’s time period is proportional to the cube of the semi-major axis of its orbit. This is known as the law of time period and gives the relationship between the size of the orbit of a planet and its time of revolution.
Kepler did not know why the planets move in this way. Three generations later when Newton turned his attention to the motion of the planets, he discovered that each of Kepler’s laws can be derived.
They are consequences of Newton’s law of motion and the law of gravitation. Let us first consider the elliptical orbits described in Kepler’s first law. Figure shows the geometry of the ellipse. The longest dimension is the major axis with half length a. This half length is called the semi-major axis.

SP + S ’ P = constant
Here, S and S ′ are the foci and P any point on the ellipse. The sun is at S and planet at P. The distance of each focus from the centre of ellipse is ea , where e is the dimensionless number between 0 to 1 called the eccentricity. If e = 0, the ellipse is a circle. The actual orbits of the planets are nearly circular, their eccentricities range from 0.007 for Venus to 0.248 for Pluto.
For earth e = 0.017. The point in the planet’s orbit closest to the sun is the perihelion and the point most distant from the sun is aphelion.
Law of orbits
Newton was able to show that for a body acted on by an attractive force proportional to 1/r 2 the only possible closed orbits are a circle or an ellipse. The open orbits must be parabolas or hyperbolas. He also showed that if total energy E is negative the orbit is an ellipse (or circle), if it is zero the orbit is a parabola and if E is positive the orbit is a hyperbola.
Further, it was also shown that the orbits under the attractive force F = k / r n are stable for n < 3. Therefore, it follows that circular orbits will be stable for a force varying inversely as the distance or the square of the distance and will be unstable for the inverse cube (or a higher power) law
Explanation for law of Areas PP ’ = v dt
P ’ M = ( PP ’) sin (180 o – θ) = PP ’ sin θ = ( v sin θ) dt

Thus, Kepler's second law, that areal velocity is constant, means that angular momentum is constant. It is easy to see why the angular momentum of the planet must be constant. According to Newton's law the rate of change of L equals the torque of the gravitational force F acting on the planet,
Here, r is the radius vector of planet from the centre of the sun and the force F is directed from the planet towards the centre of the sun. So, these vectors always lie along the same line and their vector product r × F is zero. Hence,
or L = constant. Thus, from Eq. (ii) we can see that
= constant if L = constant. Thus, second law is actually the law of conservation of angular momentum.
Explanation of Law of periods
We have already derived Kepler’s third law for the particular case of circular orbits. T 2 is proportional to r 3 Newton was able to show that the same relationship holds for an elliptical orbit, with the orbit radius r replaced by semimajor axis a. Thus,
Important Points To Remember
1. The areal velocity of a planet is constant (Kepler’s second law) and is given by dA/dt = L / 2 m Here, L is the angular momentum of the planet about sun.
2. Most of the problems of gravitation are solved by two conservation laws: (i) Law of Conservation of Angular Momentum about sun and (ii) Law of Conservation of Mechanical (potential + kinetic) Energy Hence, the following two equations are used in most of the cases,
Here, the following two equations are used in most of the cases,
mv r sin θ = constant ….. (1)
mv
2
–
= constant
….. (2)
At aphelion and perihelion positions θ = 90 o Hence, equation (1) can be written as,
mv r sin90 o = constant

3. Applying the above-mentioned conservation Laws at the aphelion and perihelion positions along with the knowledge that
r 1 = a phelion = a (1 + e ) and r 2 = p erihelion = a (1 – e ) where e is the eccentricity of the elliptical orbit. Then, we can show that. v min = a phelion = v 1 = v
max
=
v
perhilion
=
v
2
=
v
max
=
v
perhilion
=
v
2
=
 and the total energy of the planet is calculated by.
E = U + K = –
and the total energy of the planet is calculated by.
E = U + K = –

4. Trajectory of a body projected from point A in the direction AB with different initial velocities: Let a body be projected from point A with velocity v in the direction AB. For different values of v the paths are different. Here are the possible cases.
Trajectory of a body projected from point A in the direction AB with different initial velocities: Let a body be projected from A with velocity v in the direction AB. For different values of v the paths are different. Here are the possible cases.

(i) If v = 0, path is a straight line from A to O.
(ii) If 0 < v < v 0 , path is an ellipse with centre O of the earth as a focus.
(iii) If v = v 0 , path is a circle with O as the centre.
(iv) If v 0 < v < v e , path is again an ellipse with O as a focus.
(v) If v = v e , body escapes from the gravitational pull of the earth and path is a parabola.
(vi) If v > v e , body again escapes but now the
Path is hyperbola. Here, v 0 = orbital speed

Important Points Related To Kepler's Laws
(a) From case (i) to (iv) total energy of the body is negative. Hence, these are the closed orbits and are also called Bound Trajectories. For case (v) total energy is zero and for case (vi) total energy is positive. In these two cases orbits are open and are called Unbound Trajectories.

(b) If v is not very large the elliptical orbit will intersect the earth and the body will fall back to earth.
Q.1: Kepler’s third law is known as__________
Q.2 : Kepler’s 2nd law is also known as_____________
Q.3 : The farther away a planet is from the sun, the __________ it takes it to orbit the sun once.